|
INTRODUZIONE
Il sistema di accensione che descrivo rappresenta la naturale
evoluzione del circuito salva puntine già presentato, il quale pur
risolvendo in modo ottimale il problema dell'usura delle parti
platinate delle puntine, tuttavia non può evitare il consumo per
strofinio del pattino in teflon, con conseguente variazione della fase
di accensione e sostituzione finale delle puntine. In aggiunta a ciò occorre considerare, per motori con
più di 50.000 km,
la probabile rottura sia della molla che della massa di espansione
dell'anticipo automatico. La molla e la massa si rompono nel loro
punto di aggancio.
Il sistema si basa sull'impiego di due interruttori ottici per la
parte di misura della velocità di rotazione del motore e su due
microcontrollori (PIC) in tecnologia CMOS a 8 bit per l'elaborazione dei
segnali di comando del punto di accensione. Poiché i sensori rilevano
direttamente la rotazione dell'albero motore e non c'è modo, in
generale, di
distinguere la fase di scoppio da quella di aspirazione il sistema genera una scintilla
ad ogni giro del motore (scintilla persa). Per le moto guzzi
invece stante lo sfasamento dei cilindri di 90° che comporta un
diverso tempo di rotazione delle fasi di scoppio e di scarico è però possibile
la
sincronizzazione dell'accensione con il ciclo di scoppio, con ciò consentendo di
sopprimere la scintilla (interruttore INT chiuso) nel ciclo di scarico con evidenti
vantaggi in termini di affidabilità, assorbimento di corrente,
riscaldamento bobine e di energia resa alle candele in particolare
agli alti regimi di rotazione.
Per
la rilevazione degli istanti di passaggio del motore per i punti di
anticipo fisso vengono utilizzati due dischi
(in alluminio) montati assialmente all'alternatore sovrapposti e mobili l'uno
rispetto all'altro per facilitare la messa in fase.
I dischi, ruotando,
interrompono il fascio di luce tra le espansioni degli
interruttori ottici e la transizione da non passaggio luce a
quella di passaggio corrisponde al transito dei pistoni per il
punto di anticipo fisso (7° per il V65).
La scelta di adottare
due microprocessori separati discende dalla
necessità di mantenere alta l'affidabilità generale in quanto in
questo modo la rottura di un componente di una sezione non tocca in
alcun modo la funzionalità dell'altra (esattamente come avviene per
il sistema a puntine).
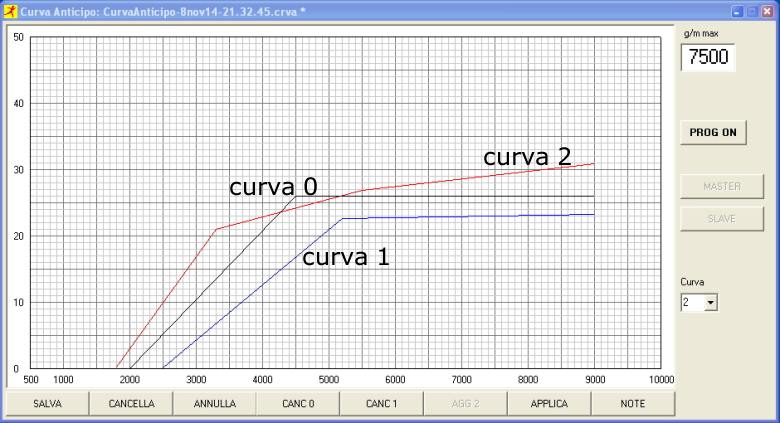
Il sistema consente (stante la programmabilità
del dispositivo) di scegliere in tempo reale (con un deviatore a 3
posizioni) la
curva di anticipo tra tre disponibili, costruite dall'utente, delle
quali una fissa (programmata in sede di scrittura del pic) e altre due
modificabili a mezzo della funzione dedicata del software di
interfaccia INTACCEL (s.o. Windows).
In aggiunta, il modulo di controllo trasmette sul suo canale seriale
(31.250 Baud) il tempo di rotazione (e altri dati) di ciascun giro
motore consentendo sempre utilizzando INTACCEL misure di
variazione della velocità in funzione del tempo.
Il collegamento con il PC è realizzato tramite interfaccia MIDI/USB
din basso costo e facilmente reperibile in commercio.
Vedi un breve video dimostrativo del
funzionamento del disco e degli interruttori ottici che sostituiscono
le puntine.
Il sistema è applicabile a tutti i modelli moto Guzzi; per quelli a
spinterogeno occorrerà aggiungere una seconda
bobina. Può essere anche utilizzata su moto dove sia possibile
installare il dispositivo disco su un asse
sincrono con l'albero di rotazione del motore.
Il preesistente sistema a puntine non viene in alcun modo alterato e
si può passare dall'uno all'altro semplicemente azionando un relais o
un deviatore a due vie anche in condizioni di marcia (il
relais/deviatore è opzionale e dopo aver preso confidenza con la
nuova accensione consiglio di non montarlo), in questo caso
solo però se è installato il sistema salva
puntine. Dopo aver fatto qualche migliaio di km e aver verificato
che tutto funziona consiglio però di rendere inattivo il sistema a
puntine in modo da preservarlo per un possibile (tutto è possibile)
uso futuro. Occorrerà bloccare l'espansione delle masse centrifughe
(basta legarle con un filo) e togliere le puntine oppure mantenerle
sollevate dall'alberino che le controlla.
Al momento (giugno 2015, km 120.000) ho percorso con il
sistema di accensione elettronico oltre 38.000 km (nelle
varie condizioni atmosferiche, temperature ambiente sino a 41°C) senza alcun
inconveniente imputabile al sistema (la prima sperimentazione risale
al mese di giugno 2009).
Le caratteristiche della (ultima) versione 5.25 sono:
1. campo di applicazione sino a 8.000 g/m (per evitare
la dissipazione eccessiva di potenza in calore da parte della bobina la
durata dell'impulso di corrente che la attraversa viene variata in funzione della
velocità di rotazione);
2. andamento della
curva dell'anticipo automatico programmabile da PC per mezzo
dell'interfaccia INTACCEL ad hoc sviluppata (Windows XP). E'
possibile programmare sino a 3 curve 0, 1, 2, di anticipo che possono
essere selezionate in tempo reale mediante l'uso di un selettore rotante.
Le curve sono disegnate dall'utente spostando il dispositivo di
puntamento sul
diagramma di lavoro della funzione Programmazione Curva Anticipo (vedi
pagina di programmazione). Delle tre curve la curva 0 è scritta
nella memoria di programma e non può essere modificata dall'utente.
Il valore dell'anticipo è dato con passi di 100 g/m;
3. funzionamento in modalità sincronizzata (per le moto
guzzi). Dopo l'accensione (entro 10 s) del motore il programma si allinea
con il ciclo di scoppio ed elimina la scintilla in fase di scarico.
Il tempo di circolazione della corrente nella bobina agli alti regimi
aumenta con ciò portando al massimo il valore dell'energia conferita
alle candele. Il funzionamento in modo sincronizzato è scelto
chiudendo l'interruttore INT. Quindi con INT aperto o
assente il funzionamento è normale a doppia scintilla;
4. misura dinamica della tensione di batteria. Correlata
al tempo corrente della misura consente la visualizzazione su PC della
tensione nel tempo (INTACCEL) dando la possibilità di osservare
l'andamento della tensione in particolare durante la fase di
accensione motore dove massima è l'erogazione della corrente della
batteria. Lo scostamento della tensione dal valore nominale consente
in fase di avviamento motore di valutare lo stato di salute della
batteria, mentre in fase di marcia potrà risultare utile per valutare
il funzionamento del gruppo alternatore/regolatore;
5. durata dell'impulso di corrente di eccitazione della bobina
in funzione della velocità di rotazione programmato in
sede di scrittura del PC;
6. uscita per segnalare con un led la modalità di
funzionamento sincronizzato;
7. uscita per segnalare l'assenza di rotazione ROTOFF. Può
essere usato per inibire l'accensione del motore tramite il comando
START quando il motore sia già acceso;
8. trasmissione dati seriale start/stop a 31.250 Baud
(protocollo MIDI). Trasmette ad ogni giro motore le informazioni di periodo di rotazione, angolo di anticipo applicato,
posizione del selettore SEL e del pulsante PLS, modalità di
funzionamento sincronizzato/no sincronizzato, tensione di batteria;
9. interruzione della corrente nella bobina a motore fermo (utile per evitare
bruciature delle bobine a bassa resistenza).
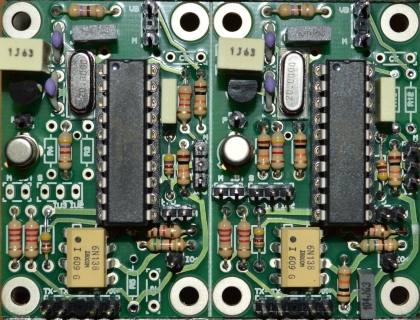
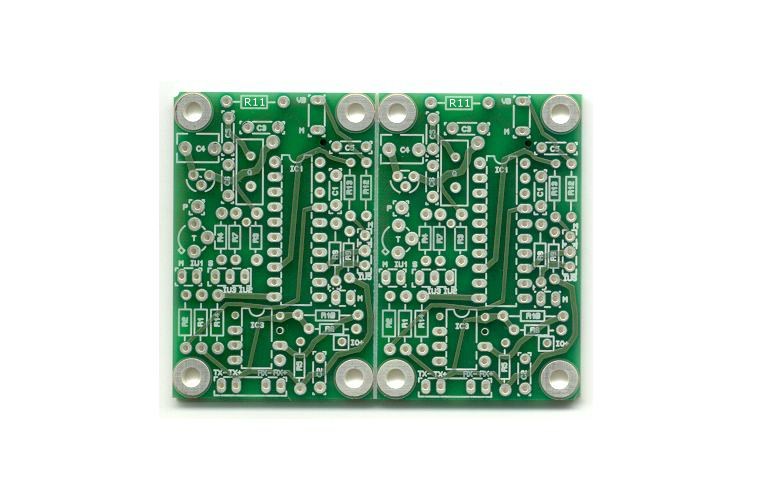
Per semplificare la costruzione dei due circuiti che compongono il
sistema sono disponibili i due circuiti stampati per il modulo
di controllo e per gli interruttori
ottici (realizzati in modo professionale).
PRINCIPIO DI FUNZIONAMENTO
Il processo di generazione della scintilla ad un istante
prestabilito può considerarsi come risultato di tre funzioni
distinte: A rilevazione degli istanti di passaggio dei pistoni
per i punti di anticipo fisso; B misura del periodo di
rotazione del motore, calcolo del valore di anticipo tenendo conto
della curva dell'anticipo da applicare e di tutte le variabile interne
e esterne (tempo di esecuzione delle istruzioni, tempo di ritardo tra
il fronte di spegnimento del mosfet e istante di inizio scarica della
candela), generazione del segnale
elettrico per il comando di accensione; C attivazione/disattivazione del
passaggio della corrente attraverso la bobina per la generazione della scintilla.
A: la conversione degli istanti di passaggio per i punti di
anticipo fisso in un segnale elettrico è realizzata facendo ruotare
un disco di alluminio con diametro massimo di 68 mm, montato centralmente in
testa alla vite di tenuta dell'alternatore, 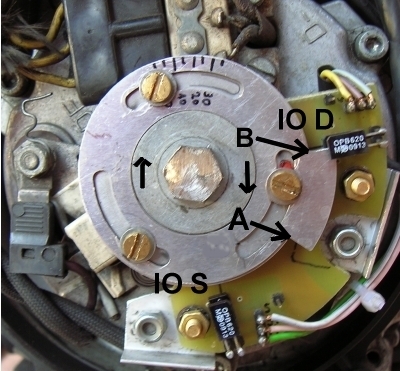 tra le espansione di due
interruttori ottici (uno per cilindro)
tra le espansione di due
interruttori ottici (uno per cilindro)  tipo OPB620 della OPTEK. La
scelta di questo componente è dovuta sia al fatto che esso è in grado di
operare sino a 100°C (la casa costruttrice garantisce che
l'interruttore ottico funziona regolarmente sino alla temperatura di
100 °C, ciò implica anche che comunque l'OPB620 può lavorare senza
danni a temperature di poco superiori), temperatura difficilmente
raggiungibile davanti all'alternatore, sia alla semplicità di
utilizzo e installazione. tipo OPB620 della OPTEK. La
scelta di questo componente è dovuta sia al fatto che esso è in grado di
operare sino a 100°C (la casa costruttrice garantisce che
l'interruttore ottico funziona regolarmente sino alla temperatura di
100 °C, ciò implica anche che comunque l'OPB620 può lavorare senza
danni a temperature di poco superiori), temperatura difficilmente
raggiungibile davanti all'alternatore, sia alla semplicità di
utilizzo e installazione.
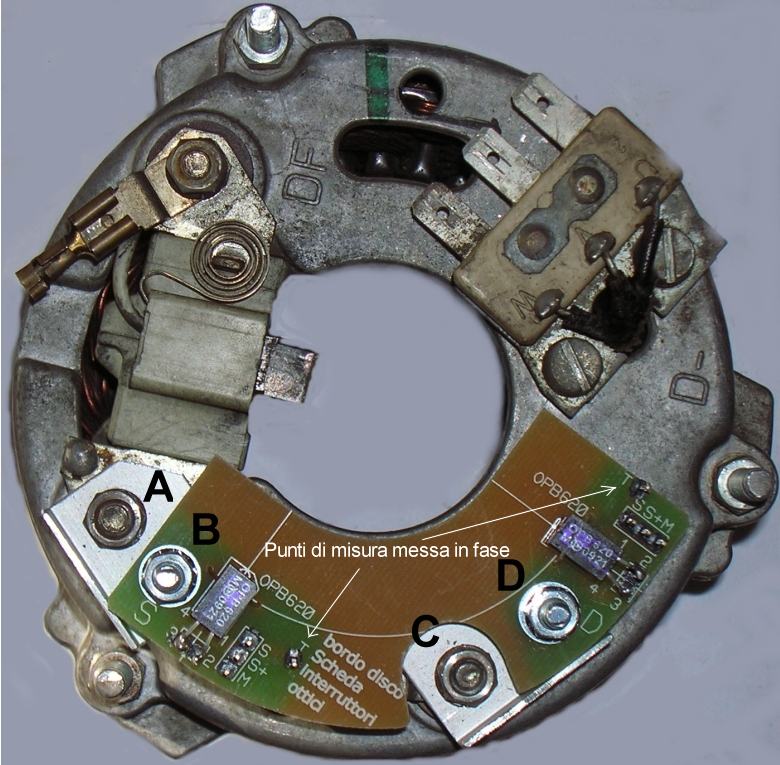
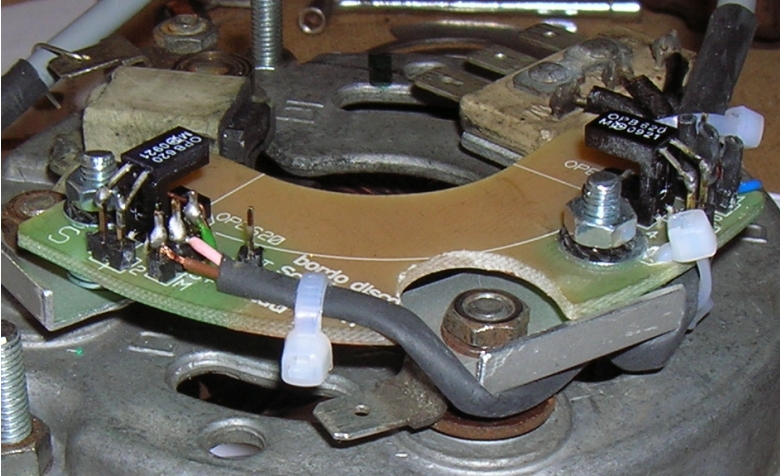
Gli OPB620 sono disposti a 90° e quello più
in alto (IO D) fornisce il segnale per il cilindro destro (visto da chi
guida). Come si vede in figura (vedi dischi)
il bordo per 45° ha diametro 68 mm e per i restanti 315° 56 mm.
Questa diversità in fase di rotazione consente il passaggio/interruzione della
luce tra gli elementi diodo emittente e foto-transistor ricevente
dell'OPB620. Al momento della messa in fase il disco va bloccato in modo che con il pistone destro al
punto di anticipo fisso (osservare la punzonatura sul volano motore), considerando
che la rotazione vista frontalmente è in senso orario, il bordo B si
trovi al centro del OPB620 destro (nella foto accanto il il disco è
nella posizione di passaggio per il punto anticipo fisso, transizione non
passaggio luce->passaggio). In
questa condizione il passaggio del pistone per il punto di anticipo
fisso è indicato dal fronte di discesa della tensione (da 5 a 0V)
all'ingresso del modulo di controllo.
Gli OPB620 sono montati su un circuito
stampato dedicato (nella foto è mostrato il prototipo) fissato all'alternatore con due
angolari di
alluminio. Il segnale generato dalla rotazione del
disco è un impulso di 5V con durata 1/8 del periodo di rotazione. A 7500 g/m poiché il periodo è di 8,0 ms
l'impulso ha una durata di 1,0 ms.
B: il PIC 16F890 è pilotato dall'oscillatore (segnale di
orologio, oscillatore controllato a quarzo) interno di 20,000 MHz. La misura del periodo di rotazione avviene contando
il numero di cicli alla frequenza di 500 kHz (periodo 2 us microsecondi) che si hanno tra gli istanti di attraversamento degli OPB620
da parte del bordo B e successivamente (all'interno dello stesso
ciclo) del bordo A (guardando il disco la rotazione è oraria).
Sino alla
velocità di rotazione corrispondente all'inizio dell'anticipo
automatico il segnale di accensione è generato
direttamente in corrispondenza al fronte di discesa B del segnale in
uscita dagli interruttori ottici (anticipo fisso) e la durata dell'impulso di
corrente nella bobina è 1/3 (circa) del periodo di rotazione stesso. Nel
campo di controllo automatico il valore
dell'anticipo è calcolato in base al valore caratteristico di ciascuna
curva per la velocità di rotazione corrente (i dati sono programmati sulla eeprom del microprocessore).
 La
curva dell'anticipo che viene utilizzata per il calcolo è selezionata
dal selettore SEL, se SEL non è collegato viene considerata la
curva programmata come curva 0 (curva nominale). La
curva dell'anticipo che viene utilizzata per il calcolo è selezionata
dal selettore SEL, se SEL non è collegato viene considerata la
curva programmata come curva 0 (curva nominale).
A partire dall'istante di attraversamento del OPB620 del bordo A (il
disco è a 45° dal punto fisso) il pic calcola la velocità di
rotazione ed estrae dalla memoria selezionata i gradi di anticipo da erogare espressi in unità di 4 us.
Tendo conto del tempo corrente, del tempo relativo ai gradi di
anticipo e della distanza in tempo dal punto fisso calcola il tempo di
attesa per lo spegnimento della bobina e la generazione dell'accensione
della candela.
Poiché la corrente nella bobina produce
calore e questo conduce ad una diminuzione dell'energia
immagazzinabile, la programmazione deve essere tale da trovare un
equilibrio tra l'esigenza di massimizzare l'energia immagazzinata e
quella di contenimento della dissipazione termica dell'avvolgimento
primario della bobina per effetto Joule. Per minimizzare
il riscaldamento il dispositivo di potenza dovrebbe essere di tipo a
scarica capacitiva. A 1000 g/m il periodo di rotazione è di 60 ms e
l'impulso di accensione bobina è di 15 ms, ciò significa che mentre
nel circuito classico la corrente scorre per metà ciclo nel sistema
elettronico scorre per un quarto del periodo con evidente riduzione del
riscaldamento. Per bobine uguali a quella in dotazione della mia V65SP
questo vantaggio diminuisce però con l'aumentare del
regime di rotazione. Il punto di incrocio è a circa 5000 g/m dove il
periodo di rotazione è di 12 ms
e la durata dell'impulso di accensione dovrebbe essere programmato a 6
ms (ciò per mantenere lo stesso rapporto tra tempo di circolazione
corrente e periodo di rotazione alla base della progettazione della
bobina). Oltre i 5000 g/m
l'accensione ad ogni giro motore comporta un riscaldamento maggiore
rispetto alla situazione a puntine. Per evitare
la dissipazione eccessiva di potenza in calore da parte della bobina
per velocità di rotazione superiori a 6.000 g/m la larghezza
dell'impulso di corrente di accensione va programmato conseguentemente.
In modalità di funzionamento sincronizzato a questi regimi di
rotazione poiché non c'è più la scintilla in fase di
scarico è possibile aumentare (senza un'eccessiva dissipazione di
calore) il tempo di circolazione della corrente sino ad aumentare
l'energia immagazzinata nella bobina al suo massimo consentito dalle
sue caratteristiche elettriche.
C: il modulo che controlla direttamente la corrente nella
bobina è lo stesso utilizzato nel progetto
salva puntine. Questo è direttamente connesso all'uscita del
modulo di controllo dell'anticipo. In futuro lo stadio di potenza
(semplificato) potrebbe essere integrato nello stesso circuito stampato
dei PIC.
CARATTERISTICHE ELETTRICHE E FUNZIONALI
1. ingresso IU1 riceve un impulso 5-0-5 V dagli interruttori ottici;
2. IO+ fornisce la corrente di funzionamento all'interruttore
ottico;
3. IU5 uscita per segnalare l'assenza di rotazione ROTOFF. Può
essere usato per inibire l'accensione del motore tramite il comando
START quando il motore sia già acceso;
4. TX+ TX- trasmissione dati seriale start/stop a 31.250 Baud.
Consente l'invio di dati di programmazione dal modulo SINISTRO al modulo
DESTRO. Trasmette
le informazioni di tempo di rotazione, angolo di anticipo
applicato, ad un dispositivo ricevente esterno
(PC) per mezzo dell'interfaccia MIDI/USB (vedi COLLEGAMENTO
MIDI);
5. RX+ RX- ricezione dati canale seriale a 31250 Baud. Riceve
dati di programmazione e di sincronismo dal modulo SINISTRO, dati di
programmazione da un dispositivo esterno;
6. SEL seleziona la curva di anticipo programmata numerate da
0 (di base) a 2. Con SEL non collegato la curva attiva è quella
numero 0 (vedere il programma INTACCELv10 aprendo dal menù la pagina
"Programmazione Curva Anticipo");
7. INT abilita o disabilita il funzionamento in modo
sincronizzato, Con INT aperto o assente il funzionamento è
quello classico con scintilla persa;
8. uscita U per led di segnalazione
modalità di funzionamento.
REALIZZAZIONE
Essenzialmente il sistema di accensione può essere realizzato in
due modi diversi, modello di base e modello completo.
Entrambi sono alloggiati nello stesso contenitore e utilizzano gli
stessi circuiti, componenti, parti meccaniche e software.
Il circuito stampato può essere alloggiato in una scatola TEKO 2/A
(come per il salva-puntine). La scatola dovrà essere installata con
le stesse precauzioni adottate per il salva-puntine e possibilmente ad
essa vicina per ridurre la lunghezza dei due cavi di collegamento
(punti P).
Il componente principale
PIC16F690 (va montato su zoccolo da 20 pin di qualità) è fornito
dallo scrivente aggiornato con l'ultima versione del programma di
gestione; per le programmazioni delle versioni successive il
richiedente dovrà farsi carico delle sole spese postali.
Particolare cura dovrà porsi per la parte meccanica in modo da
assicurare nel tempo la stabilità del disco e degli interruttori
ottici.
Il carter che chiude l'alternatore dovrà essere distanziato dalla sua
normale sede di fissaggio di almeno 5 mm per consentire al disco di
ruotare senza impedimento.
Modello di base.
Il modello di base si distingue dal punto di vista costruttivo per
il minore numero di componenti montati e dal punto di
vista funzionale dalla non programmabilità locale (attraverso il PC)
delle curve di anticipo e dei tempi di circolazione della corrente
nella bobina. Risulta inoltre semplificato il cablaggio e ridotti i
cavi di collegamento. E' consigliato a tutti coloro che vogliono
semplicemente sostituire il vecchio sistema a puntine. Da
notare che il software dei due modelli rimane lo stesso, la
differenza è nel fatto che nel modello base non è possibile la
comunicazione tra i due PIC e tra i PIC e il PC.
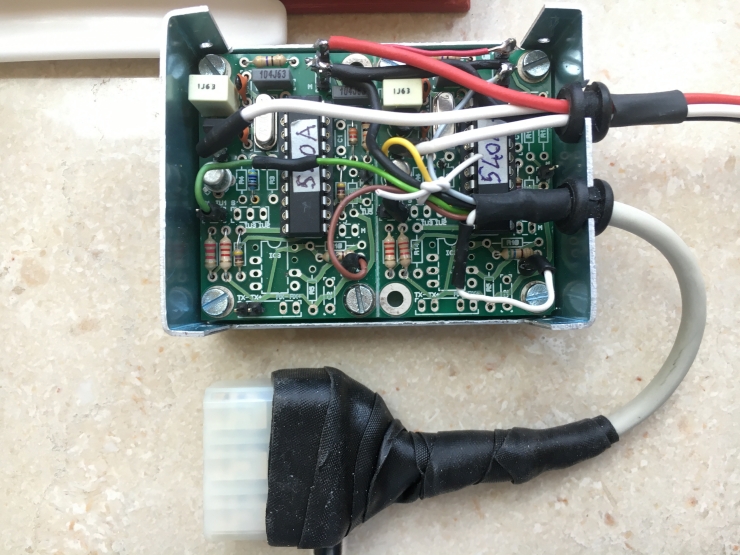
Lo schema elettrico di riferimento è in figura SCHEMA
ELETTRICO DI BASE mentre lo schema di cablaggio che ne consegue è
quello di figura ACCENSIONE
DI BASE CABLAGGIO.
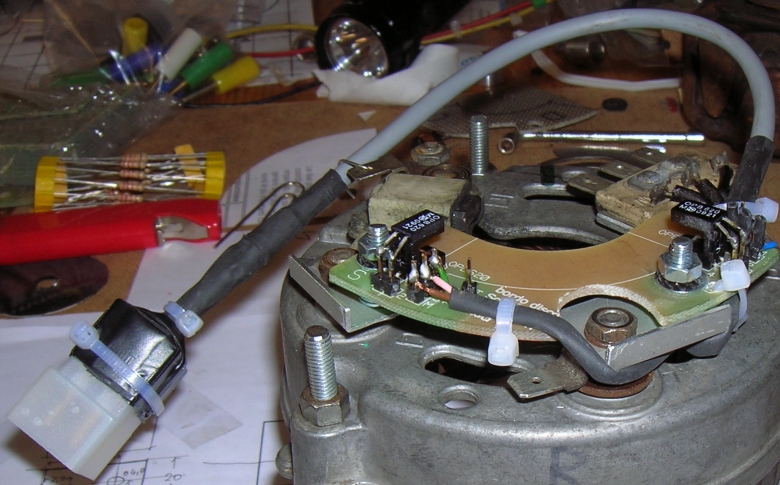
Le due sezioni Master e Slave funzionano allo stesso modo (Master) e
sono tra esse indipendenti poiché manca il canale di comunicazione
che le collega. I PIC sono forniti già completi di programmazione che
viene stabilita in base alla curva di accensione desiderata e alle
caratteristiche elettriche (dinamiche) delle bobine utilizzate. In
figura il modulo inserito nel contenitore e connesso con due cavi al
modulo di potenza (salva-puntine) e agli interruttori ottici.
La foto accanto è del modello di base ed è possibile valutare la
differenza in termini di componenti con quello completo (più in
alto).
Modello completo.
Come si vede dallo schema elettrico MODULO
CONTROLLO COMPLETO SCHEMA ELETTRICO e dallo schema di cablaggio ACCENSIONE
COMPLETA CABLAGGIO il modello completo ha montati i due isolatori ottici che consentono la comunicazione tra PIC e tra il
modulo di controllo e il PC, più alcune resistenze per il pilotaggio
di due LED e per la connessione al commutatore a 1 via 6 posizioni
SEL1 e al pulsante PLS. L'utilizzo dei led, di SEL1 e PLS è descritto
più in alto nel paragrafo CARATTERISTICHE ELETTRICHE E FUNZIONALI.
La versione attuale del programma 1.63 non fa uso dei due diodi LED e
del pulsante PLS; le resistenze e i terminali ad essi relativi possono
però essere comunque montati per usi futuri.
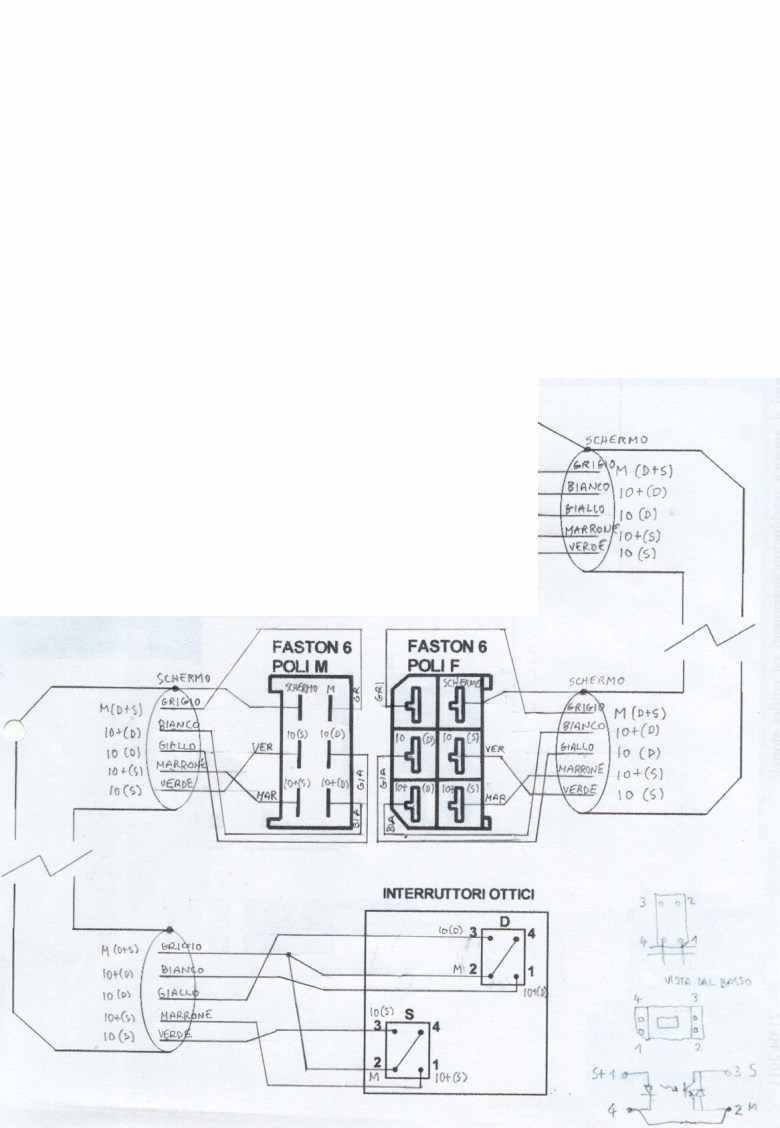
Cablaggio
Il circuito
stampato del modulo di controllo ospita le due sezioni Sinistra e
Destra da collegare poi al dispositivo salva-puntine
come indicato nello schema di cablaggio CABLAGGIO
MODULO CONTROLLO COMPLETO. Come detto non è necessario eseguire tutti i
collegamenti mostrati nel cablaggio, ci si potrà limitare a quelli
indispensabili in funzione delle proprie esigenze. Lo schema di
cablaggio CABLAGGIO
SENSORI E MODULO DI POTENZA (SALVA-PUNTINE) riporta in dettaglio i
collegamenti da fare per la connessione del modulo di controllo
accensione agli interruttori ottici e al salva-puntine. Questo è il cablaggio
minimo da realizzare per avere il sistema di accensione elettronica di
base. Eseguire i collegamenti di massa come indicato per minimizzare
l'influenza dei disturbi elettrici sui segnali generati dagli
interruttori.
Utilizzare un cavo schermato da 6 poli; i fili vanno saldati
direttamente ai pin degli OPB620 da un lato e dall'altro vanno
collegati ad un connettore faston a 6 poli. I fili che vanno al
salva-puntine sono da 0,75 mmq. Il filo di massa va collegato
all'omonimo del salva-puntine appena dopo l'uscita del contenitore TEKO. Per
la costruzione dei dischi fare
riferimento alla figura DISCHI
SENSORI.
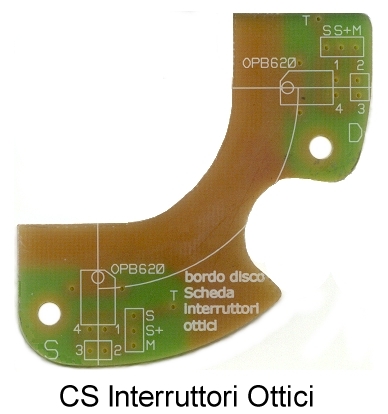
PREPARAZIONE ALTERNATORE CON SCHEDA INTERRUTTORI OTTICI (IO)
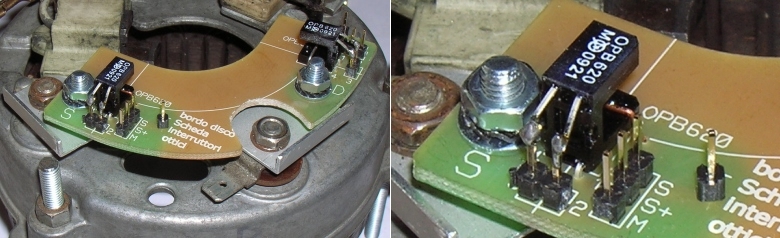
Realizzazione scheda IO
 Montare
i terminali per cs (sono venduti in strisce) dopo averli
separati a coppie di 3, 2 e
1 (vedi foto). Vanno inseriti dal lato saldature utilizzando un piccolo
martello (con attenzione). Una volta inseriti a fondo estrarre la
parte di plastica e reinserirla lato componenti. Essendo la lamina del
cs molto spessa (0,105 mm) la saldatura va fatta con un adeguato
saldatore (circa 50W). I PIC vanno montati allineandoli perfettamente
alla serigrafia, ciò garantirà un angolo di montaggio di 90° tra
l'interruttore di sx e di dx. Nell'operazione di messa in fase
potrebbe rendersi necessario ritoccare la posizione del sx rispetto al
dx e ciò sarà fatto ruotando opportunamente a mano
l'interruttore sx (lo spostamento potrà essere dell'ordine di 1
o 2°). Consiglio anche di saldare un filo a U sul bordo del fotodiodo
inferiore per ridurre al minimo la possibilità di vibrazioni
trasmesse dall'alternatore alla scheda (non è strettamente
necessario, sul mio sistema non c'è e funziona tutto benissimo). Montare
i terminali per cs (sono venduti in strisce) dopo averli
separati a coppie di 3, 2 e
1 (vedi foto). Vanno inseriti dal lato saldature utilizzando un piccolo
martello (con attenzione). Una volta inseriti a fondo estrarre la
parte di plastica e reinserirla lato componenti. Essendo la lamina del
cs molto spessa (0,105 mm) la saldatura va fatta con un adeguato
saldatore (circa 50W). I PIC vanno montati allineandoli perfettamente
alla serigrafia, ciò garantirà un angolo di montaggio di 90° tra
l'interruttore di sx e di dx. Nell'operazione di messa in fase
potrebbe rendersi necessario ritoccare la posizione del sx rispetto al
dx e ciò sarà fatto ruotando opportunamente a mano
l'interruttore sx (lo spostamento potrà essere dell'ordine di 1
o 2°). Consiglio anche di saldare un filo a U sul bordo del fotodiodo
inferiore per ridurre al minimo la possibilità di vibrazioni
trasmesse dall'alternatore alla scheda (non è strettamente
necessario, sul mio sistema non c'è e funziona tutto benissimo).
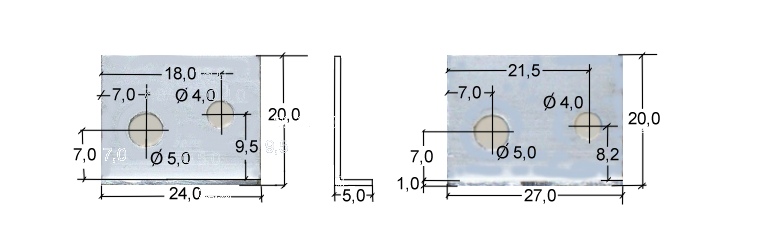
Montaggio scheda IO sull'alternatore
La scheda IO va fissata mediante due angolari a L ai gambi dei due
bulloni rovesciati A e B. Mentre A è
collegato a massa, B è sotto tensione. Togliere da A la preesistente
linguetta (non utilizzata), in B ribaltare la linguetta e montarla e
orientarla come nella foto (il
precedente cablaggio dovrà essere facilmente ripristinabile). A destra,
i due angolari sono fissati all'alternatore con i dadi originali.
Le due viti da 4M bloccano la scheda IO. Sotto il dado della vite di
sinistra sono inserite 3 rondelle mentre a destra le rondelle sono 2;
questo per compensare la differente distanza dei due angolari dal
piano dell'alternatore e mantenere la scheda IO il più possibile
parallela a questo ultimo.
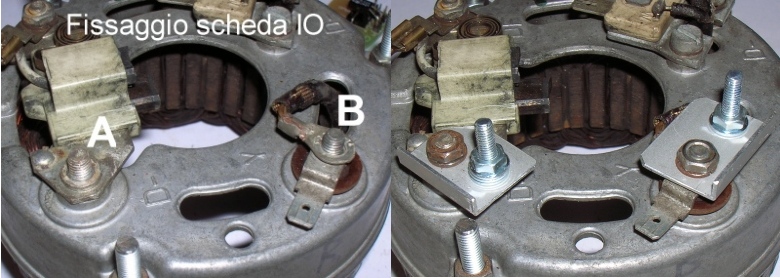
In basso a sinistra la scheda IO è ora montata sull'alternatore. Fare attenzione
al fatto che l'angolare di destra è elettricamente collegato ad un
morsetto di uscita
dell'alternatore e non deve mai entrare in contatto con la massa. A
destra particolare del montaggio IO sinistro.
Agendo sui dadi A, B, C e D allineare il profilo curvo della scheda IO
a quello dell'alternatore.
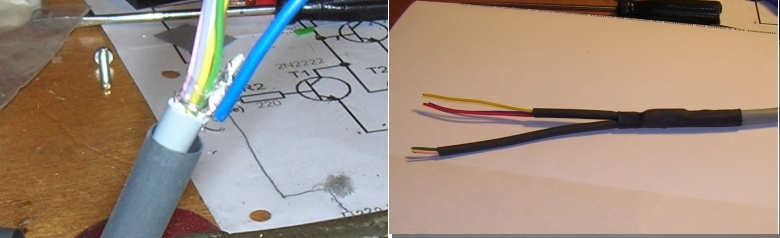
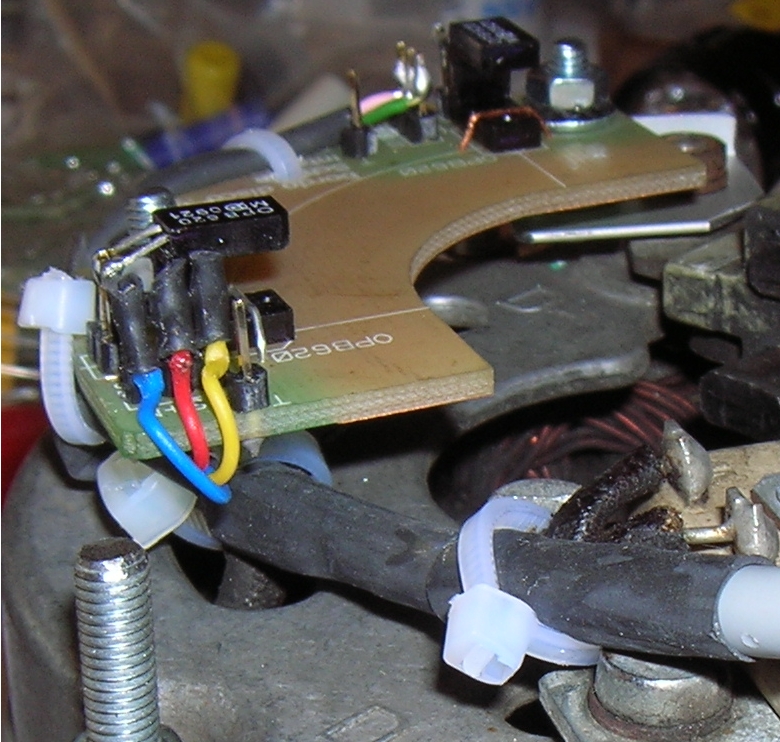
Preparazione del cavo estremità verso il connettore faston a 6 poli.
Saldare un filo di colore scuro (in figura blu) allo schermo del cavo
(vanno attorcigliati). Degli otto fili del cavo selezionarne due
gruppi da tre (colori giallo, rosso, blu IO destro, verde, rosa,
marrone IO sinistro), i due fili restanti bianco e grigio vanno
tagliati. Proteggere i fili con termorestringente da 3,2 e 6,4 mm.
Montare il connettore a 6 poli.
I fili verde, rosa, marrone vanno collegati all'IO sinistro, gli altri
al destro. Bloccare i cavi dell'IO sinistro con una cinghietta
stringi-cavo previa foratura con punta da 3,0 mm sulla scheda IO;
nella parte destra (al contrario di come si vede nella foto) la
foratura dovrà essere da 1,0 mm e andrà usato un filo di rame al
posto della cinghietta. Attenzione: la maglia di schermatura del cavo
va tagliata senza essere collegata a massa.
Il cavo che si dovrà collegare alla centralina va fissato ai tre fili
già collegati al connettore a 3 poli dell'alternatore.
AVVERTENZE
Stante la delicatezza che il circuito di accensione riveste per la
sicurezza di chi viaggia, al fine di ridurre al minimo le probabilità
di rottura è necessario che il progetto proposto sia realizzato
a regola d'arte, impiegando componenti di qualità e ponendo grande
attenzione al loro montaggio.
CONCLUSIONI
Naturalmente resto a disposizione di coloro che
condividendo con me la passione per le moto vogliano cimentarsi nella realizzazione di questo utile
e innovativo sistema di accensione.
Buon viaggio,
Carlo Petrini
|



{kind=link}